

ブルべではQシートを見ながら走行する派です。GPSとしてeTrex30は使っているのですが、昔からの癖でQシートが無いとちょっと不安。ですがQシートは結構かさばるので、主催者からコマ図が提供されているときには、コマ図を各コマ毎に画像にして、それをM5StackToughというESP32というマイコンとタッチパネル液晶が防水の筐体に収まっているデバイスを利用して、そこに表示させるものを自作しブルべに使ってきました。
これがあると、Qシートを印刷していつも見えるようにハンドル下にクリップで留めて走行するという手間が省けるので結構楽。
でも今回の守山600ではコマ図の配布が無いのでどうしようかと思っていたのですが、いろいろと考えた末、Qシートをコマ図風に加工してそれを画像としてM5StackToughに表示させることにしました。
表示する情報
まずブルべの準備として、主催者から配布されるGPSルートデータをダウンロードし、Googleマップで読み込ませてQシートと照らし合わせてポイントの番号をマップ上に置いていったものを毎回作成し、ルートデータとWaypointsデータとしてeTrex30に入れて表示させながら走行しています。ですので今回作るQシートをコマ図風に加工した画像には、そのWaypoints番号とその時に曲がる方向(右折、左折など)、その地点までの総距離と各PCからの距離、そして何かうまいものが食べれそうな店などの周辺の情報を表示させることにしました。各PCからの距離を表示させるのは、総距離だけだと余計なところに寄ったりしてると次第に実際の走行距離とQシートに基づく走行距離のずれが発生してくるので、PC毎にサイコンの走行距離をリセットできるようにするためです。
エクセルマクロで加工を自動化
コマ図を作っている方の情報を探してみると、エクセルで提供されているQシートからコマ図を作れるマクロを提供されている方がいらっしゃたので、今回はそちらを利用させてもらい、少々プログラム内容を変更して必要な情報を表示させることにしました。
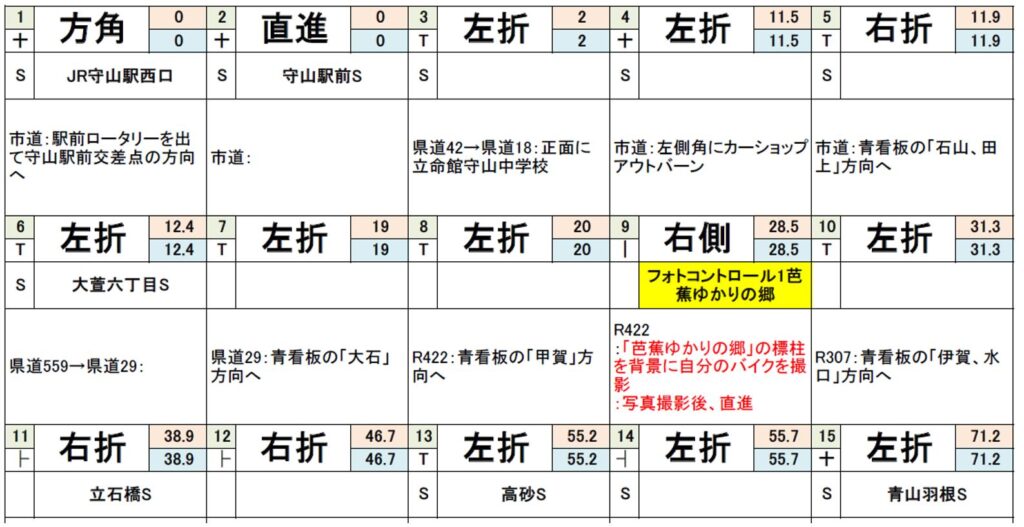
出来たものはこんな感じ。
これをPythonでコマ図毎に画像にしてM5StackToughのμSDカードにコピー。M5StackToughにはAruduinoで作った画像表示プログラムが入っていますので、タッチ液晶の左右上下の画面スワイプに対応してコマ図の送りと戻しができるようになっています。ここら辺は以前のコマ図表示と同じです。
今回は内蔵充電池だけで600km表示できた
そして今回のブルべで使ってみました。今回は熊野以降の潮岬往復が1本道で、その間M5StackToughを稼働させてコマ図風に加工したQシートを確認する必要が無かったため、ゴールまで内蔵の充電池だけで使うことができました。
改善点としては、やはり雨天時や早朝時に液晶画面に水滴が付いた時の液晶タッチパネルの感度低下。今回も時には20回くらいスワイプしてようやく画面が切り替わるということもありました。できれば物理ボタンでも操作できるようにした方が良いかとも思うのですが、どうしましょうか。


コメント